


5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床彈性動(dòng)力學(xué)分析
2016-12-7 來(lái)源:燕山大學(xué)河北省并聯(lián)機(jī)器人與機(jī)電系統(tǒng)實(shí)驗(yàn)室 作者:周鑫 許允斗 姚建濤 鄭魁敬 趙永生
摘要:結(jié)合有限元法和子結(jié)構(gòu)法建立了5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床的彈性動(dòng)力學(xué)模型.首先,將系統(tǒng)劃分為不同的子結(jié)構(gòu),根據(jù)空間柔性梁理論求出單元?jiǎng)恿W(xué)方程,根據(jù)關(guān)節(jié)特點(diǎn)將各個(gè)梁?jiǎn)卧M裝成各個(gè)驅(qū)動(dòng)分支;根據(jù)分支與動(dòng)平臺(tái)的運(yùn)動(dòng)學(xué)/動(dòng)力學(xué)約束,將各個(gè)分支進(jìn)行裝配,從而得到系統(tǒng)動(dòng)力學(xué)方程.以5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床作為算例,求出其動(dòng)平臺(tái)中心的動(dòng)態(tài)響應(yīng)特性.通過(guò)比較5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床及5-UPS/PRPU 非冗余驅(qū)動(dòng)并聯(lián)機(jī)床動(dòng)平臺(tái)的動(dòng)態(tài)響應(yīng),可以得到結(jié)論:冗余驅(qū)動(dòng)可以明顯改善該機(jī)床彈性動(dòng)力學(xué)特性,從而減小因彈性變形引起的誤差.研究結(jié)果為結(jié)構(gòu)設(shè)計(jì)人員進(jìn)行結(jié)構(gòu)設(shè)計(jì)及優(yōu)化提供可靠的依據(jù).
關(guān)鍵詞:并聯(lián)機(jī)床;冗余驅(qū)動(dòng);彈性動(dòng)力學(xué);動(dòng)態(tài)特性比較
0.引言
并聯(lián)機(jī)器人具有剛度高、承載能力強(qiáng)以及模塊化程度高等特點(diǎn),廣泛應(yīng)用于航空航天、國(guó)防軍事等領(lǐng)域.然而,由于并聯(lián)機(jī)器人的工作空間小、容易產(chǎn)生奇異位型等缺點(diǎn),在實(shí)際生產(chǎn)中往往通過(guò)引入冗余驅(qū)動(dòng)的概念去解決這些問(wèn)題.高速、輕型化是并聯(lián)機(jī)器人發(fā)展的主要趨勢(shì).然而,當(dāng)輕型化的機(jī)器人在重載且高速的環(huán)境下工作時(shí),往往會(huì)由于各個(gè)分支的彈性變形影響其運(yùn)動(dòng)及動(dòng)力學(xué)性能,從而降低機(jī)器人的精度.因此,有必要對(duì)并聯(lián)機(jī)器人進(jìn)行彈性動(dòng)力學(xué)分析,并通過(guò)結(jié)構(gòu)優(yōu)化提高其動(dòng)力學(xué)特性.Liu 等[4]通過(guò)考慮連桿的變形,分析了并聯(lián)機(jī)構(gòu)的動(dòng)力學(xué)特性.
胡俊峰等提出了一種簡(jiǎn)單而精確的彈性動(dòng)力學(xué)建模方法,并通過(guò)實(shí)例進(jìn)行了驗(yàn)證.文獻(xiàn)分別針對(duì)不同的機(jī)構(gòu)建立了彈性動(dòng)力學(xué)模型,并且進(jìn)行了相應(yīng)的動(dòng)力學(xué)分析.陳修龍等[10]基于機(jī)構(gòu)的彈性動(dòng)力學(xué)模型提出了一種優(yōu)化方法.CammaraGta 等提出了一種約束優(yōu)化方法,該方法改善了3T1R 并聯(lián)機(jī)器人的彈性動(dòng)力學(xué)性能;Alberto等采用一種新的重力補(bǔ)償方法,分析了四桿機(jī)構(gòu)的彈性動(dòng)力學(xué)特性;Zhang 等以3-PRS 為例,通過(guò)建立其彈性動(dòng)力學(xué)模型提出了一種能夠分析其關(guān)節(jié)約束反力的方法.文獻(xiàn)分別從結(jié)構(gòu)、理論方法以及控制的角度對(duì)3-PRR 柔性并聯(lián)機(jī)器人進(jìn)行了深入的分析.綜上所述,現(xiàn)有文獻(xiàn)大多針對(duì)非冗余驅(qū)動(dòng)并聯(lián)機(jī)構(gòu)進(jìn)行彈性動(dòng)力學(xué)分析,而對(duì)于冗余驅(qū)動(dòng)并聯(lián)機(jī)構(gòu)的分析并不多.Zhao等比較了6-PSS 與8-PSS冗余驅(qū)動(dòng)并聯(lián)平臺(tái)的彈性動(dòng)力學(xué)特性.除此之外,鮮有文獻(xiàn)對(duì)冗余驅(qū)動(dòng)并聯(lián)機(jī)構(gòu)的彈性動(dòng)力學(xué)進(jìn)行研究,對(duì)于通過(guò)將主動(dòng)副代替被動(dòng)副從而實(shí)現(xiàn)驅(qū)動(dòng)冗余機(jī)構(gòu)的相關(guān)研究更是鮮有報(bào)道.
本文對(duì)5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)構(gòu)的彈性動(dòng)力學(xué)性能進(jìn)行了分析.首先通過(guò)結(jié)合子結(jié)構(gòu)法和有限單元法,建立了空間單元的彈性動(dòng)力學(xué)模型;然后根據(jù)各個(gè)關(guān)節(jié)的運(yùn)動(dòng)特性,將單元?jiǎng)恿W(xué)模型進(jìn)行組裝,并根據(jù)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)/動(dòng)力學(xué)約束,得到系統(tǒng)總體的彈性動(dòng)力學(xué)模型;最后以相應(yīng)的5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床為算例,通過(guò)與相應(yīng)的5-UPS/PRPU 非冗余驅(qū)動(dòng)并聯(lián)機(jī)床動(dòng)平臺(tái)中心的彈性位移進(jìn)行比較,證明冗余驅(qū)動(dòng)對(duì)機(jī)床性能的改善.
1.動(dòng)力學(xué)建模
5-UPS/PRPU 五自由度冗余驅(qū)動(dòng)并聯(lián)機(jī)床如圖1 所示,它由定平臺(tái)、動(dòng)平臺(tái)以及6 條驅(qū)動(dòng)分支等組成.機(jī)床的加工運(yùn)動(dòng)可以通過(guò)5 條結(jié)構(gòu)相同的UPS 驅(qū)動(dòng)分支及PRPU 分支(冗余分支)的移動(dòng)副共同實(shí)現(xiàn).各個(gè)移動(dòng)副的運(yùn)動(dòng)主要通過(guò)滾珠絲杠/螺母實(shí)現(xiàn).此外,沿動(dòng)平臺(tái)中心的法線方向的轉(zhuǎn)動(dòng)被PRPU 分支所約束,因此,PRPU 分支也可以稱為約束分支.R、U、S、P 分別代表轉(zhuǎn)動(dòng)副、虎克鉸、球副以及移動(dòng)副.由于機(jī)床動(dòng)平臺(tái)能夠?qū)崿F(xiàn)運(yùn)動(dòng)的自由度數(shù)目是5,而驅(qū)動(dòng)數(shù)目為6,故機(jī)床表示為5-UPS/PRPU 五自由度冗余驅(qū)動(dòng)并聯(lián)機(jī)床.
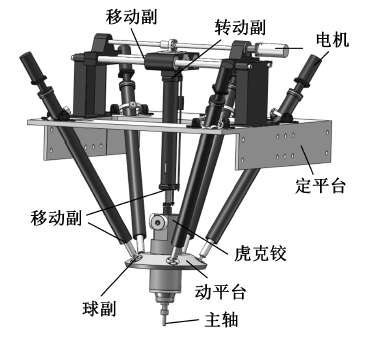
圖1 5-UPS/PRPU 機(jī)床模型結(jié)構(gòu)圖
機(jī)床結(jié)構(gòu)簡(jiǎn)圖如圖2 所示.對(duì)于該冗余驅(qū)動(dòng)五自由度并聯(lián)機(jī)床,由于機(jī)床動(dòng)平臺(tái)以及定平臺(tái)剛度很大,故忽略其彈性變形,在此假設(shè)其為剛形體;由于滑塊剛度很大,同樣將其考慮成剛體,忽略其彈性變形.因此,在本文分析過(guò)程中考慮5個(gè)UPS 驅(qū)動(dòng)分支的彈性變形;另外,將PRPU 分支的RPU 分支部分視為彈性體.
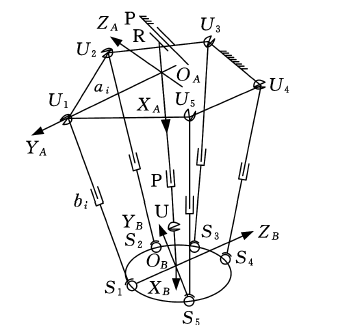
圖2 5-UPS/PRPU 機(jī)床結(jié)構(gòu)簡(jiǎn)圖
1 .1 單元?jiǎng)恿W(xué)方程
根據(jù)機(jī)床分支實(shí)際結(jié)構(gòu),將空間柔性梁?jiǎn)卧P偷刃閳A柱形截面,如圖3 所示.該空間兩
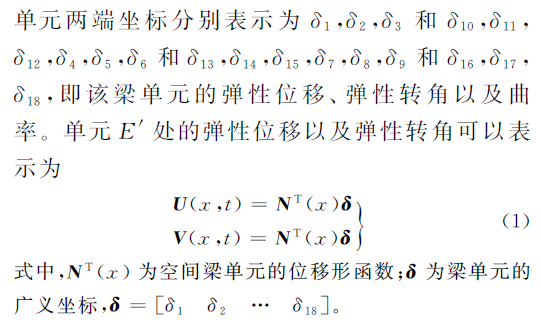
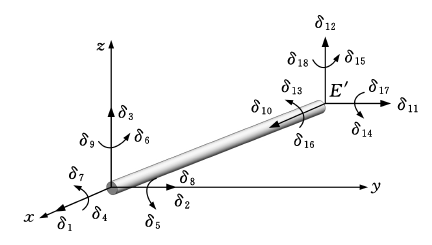
圖3 空間柔性梁?jiǎn)卧P?/font>

1 .2 分支及動(dòng)平臺(tái)的動(dòng)力學(xué)方程
首先分別將UPS 分支以及PRPU 分支等效為懸臂梁.對(duì)于PRPU 分支,則將R 0 點(diǎn)考慮為固定端,故其彈性位移及轉(zhuǎn)角均為0;對(duì)于P 0 點(diǎn),由于該點(diǎn)(移動(dòng)副)鏈接的兩個(gè)單元分屬不同的構(gòu)件,故應(yīng)當(dāng)設(shè)置不同的彈性位移;對(duì)于U 0 處(虎克鉸)可以等效成兩個(gè)匯交不共面的轉(zhuǎn)動(dòng)副,所以,U 0 處對(duì)應(yīng)的兩個(gè)曲率也為0.對(duì)于UPS 分支,同樣將U i (i = 1,2,......,5)點(diǎn)考慮為懸臂梁的固定端,那么其彈性位移及轉(zhuǎn)角均為零;由于P i 點(diǎn)連接兩個(gè)不同的構(gòu)件,故也設(shè)置不同的彈性位移;對(duì)應(yīng)S i 處為球鉸,因此,沿三個(gè)方向的曲率也為零.各個(gè)分支的系統(tǒng)坐標(biāo)系設(shè)置如圖4 所示.
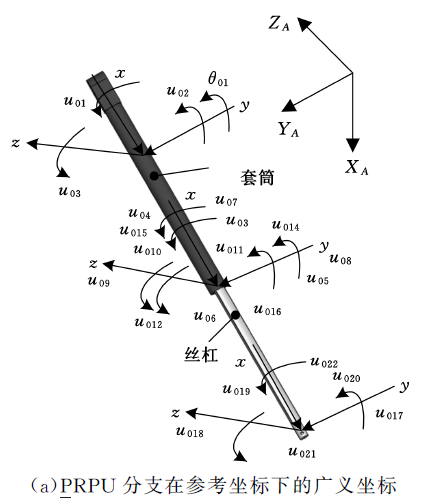
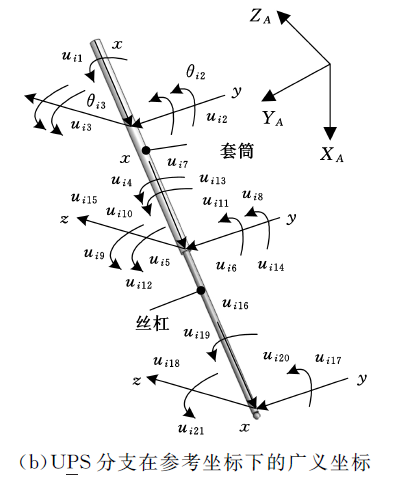
圖4 分支在參考坐標(biāo)系下的廣義坐標(biāo)
其中,M i 、K i 、F i 分別為分支的質(zhì)量矩陣、剛度矩陣以及分支所受的外載荷向量.U 表示由各個(gè)分支在參考坐標(biāo)系中的坐標(biāo)所組成的向量.
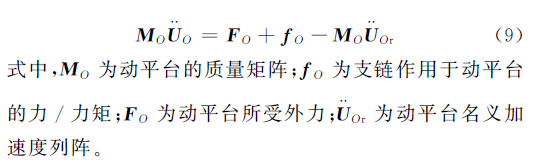
1 .3 動(dòng)平臺(tái)動(dòng)力學(xué)方程
根據(jù)前文的假設(shè),由于動(dòng)平臺(tái)的剛度很大,故考慮成剛體,則動(dòng)平臺(tái)與各個(gè)驅(qū)動(dòng)分支連接結(jié)點(diǎn)不是獨(dú)立的.因此,假設(shè)動(dòng)平臺(tái)與各個(gè)驅(qū)動(dòng)分支連接結(jié)點(diǎn)一致,且各驅(qū)動(dòng)分支對(duì)動(dòng)平臺(tái)的力與作用在動(dòng)平臺(tái)的外力相平衡,由此可以分別得到系統(tǒng)的運(yùn)動(dòng)學(xué)約束方程及其動(dòng)力學(xué)方程.根據(jù)對(duì)動(dòng)平臺(tái)的動(dòng)力學(xué)分析作為系統(tǒng)的動(dòng)力學(xué)約束,有
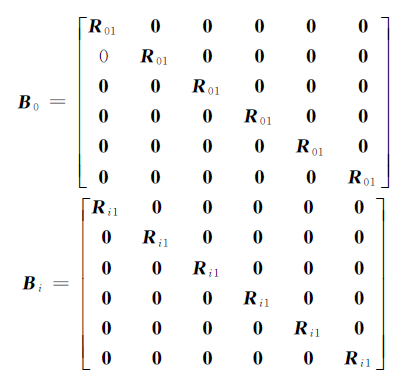
1 .4 系統(tǒng)動(dòng)力學(xué)方程的裝配
將分支系統(tǒng)中的質(zhì)量矩陣、剛度矩陣分解成以下形式:
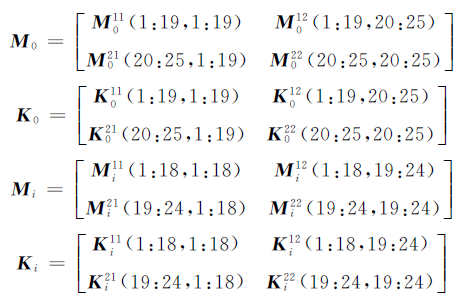
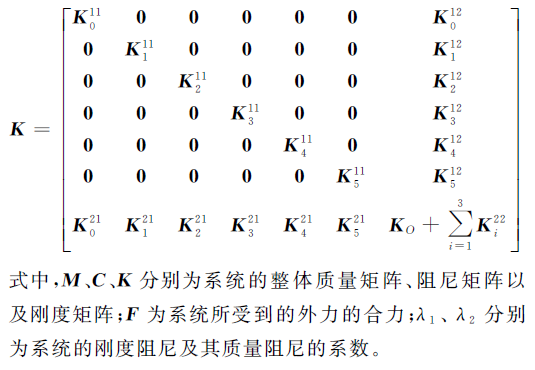
通過(guò)將各個(gè)分支動(dòng)力學(xué)方程(式(8))與動(dòng)平臺(tái)動(dòng)力學(xué)方程(式(9))結(jié)合,再結(jié)合文獻(xiàn)-中的運(yùn)動(dòng)約束方程即可得到5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床整體彈性動(dòng)力學(xué)方程:
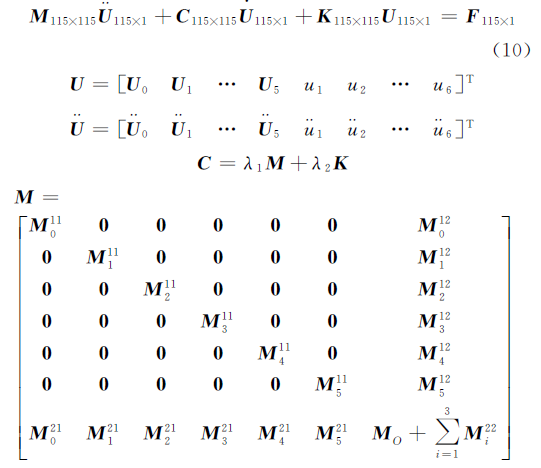
構(gòu)造冗余驅(qū)動(dòng)并聯(lián)機(jī)構(gòu)的方法有三種:① 將被動(dòng)運(yùn)動(dòng)副替換為主動(dòng)運(yùn)動(dòng)副,即關(guān)節(jié)式的冗余驅(qū)動(dòng);② 支鏈?zhǔn)降娜哂囹?qū)動(dòng),即通過(guò)添加一條或多條驅(qū)動(dòng)支鏈從而使機(jī)構(gòu)的實(shí)際驅(qū)動(dòng)鏈數(shù)目超過(guò)其運(yùn)動(dòng)所需的支鏈數(shù)目;③ 以上兩種方法的綜合.5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床屬于第一種類型,即通過(guò)添加冗余電機(jī)從而構(gòu)造出冗余驅(qū)動(dòng).值得注意的是,冗余電機(jī)的添加,使得整個(gè)系統(tǒng)具有6 個(gè)驅(qū)動(dòng)輸入.理論上而言,機(jī)床的任意位姿都對(duì)應(yīng)著無(wú)窮多組解.因此,在確定各個(gè)分支的驅(qū)動(dòng)力時(shí),允許根據(jù)不同的優(yōu)化目標(biāo)通過(guò)采用不同的優(yōu)化算法優(yōu)化機(jī)床分支的驅(qū)動(dòng)力.考慮到實(shí)際的加工問(wèn)題,本文采用文獻(xiàn)中的優(yōu)化方法,根據(jù)達(dá)朗伯原理求解冗余分支的驅(qū)動(dòng)力,從而以使冗余分支的大滑塊能夠更好地跟隨動(dòng)平臺(tái)運(yùn)動(dòng)為優(yōu)化目標(biāo).另外,對(duì)于非冗余驅(qū)動(dòng)并聯(lián)機(jī)床的驅(qū)動(dòng)力,則可根據(jù)拉格朗日方程直接求出.機(jī)床剛體動(dòng)力學(xué)的部分不再贅述.
2.動(dòng)態(tài)響應(yīng)分析
2.1 機(jī)床動(dòng)態(tài)響應(yīng)特性分析
為了分析系統(tǒng)的動(dòng)態(tài)響應(yīng)特性,令5-UPS/PRPU 五自由度冗余驅(qū)動(dòng)并聯(lián)機(jī)床的動(dòng)平臺(tái)中心的運(yùn)動(dòng)軌跡為
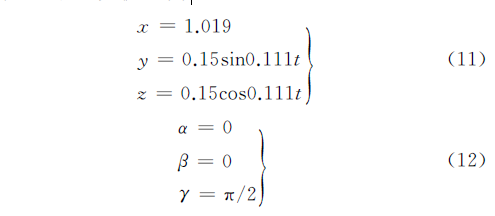
表1 機(jī)床基本結(jié)構(gòu)參數(shù)
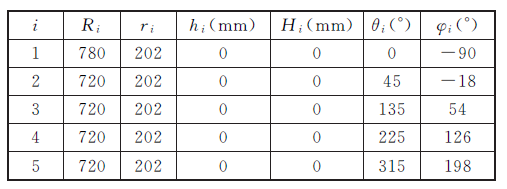
表2 UPS 分支基本結(jié)構(gòu)參數(shù)
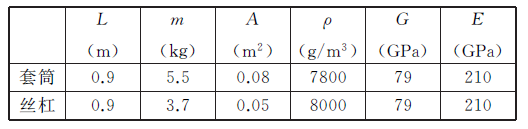
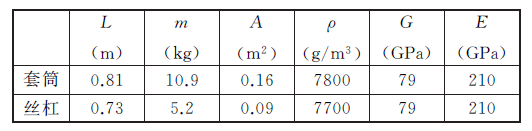
表3 PRPU 分支基本結(jié)構(gòu)參數(shù)
動(dòng)平臺(tái)的質(zhì)量為45 kg, 密度為7800kg/m3 ,剪切彈性模量為79 GPa,拉壓彈性模量為210 GPa.為了比較機(jī)床在冗余驅(qū)動(dòng)與非冗余驅(qū)動(dòng)的動(dòng)態(tài)響應(yīng)特性,分別計(jì)算了5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床與其相應(yīng)的5-UPS/PRPU 非冗余驅(qū)動(dòng)并聯(lián)機(jī)床動(dòng)平臺(tái)中心的彈性位移以及對(duì)應(yīng)的剛性位移.如圖5~圖10 所示,實(shí)線部分表示冗余驅(qū)動(dòng)并聯(lián)機(jī)床動(dòng)平臺(tái)中心的彈性位移,虛線部分表示非冗余驅(qū)動(dòng)并聯(lián)機(jī)床動(dòng)平臺(tái)中心的彈性位移.
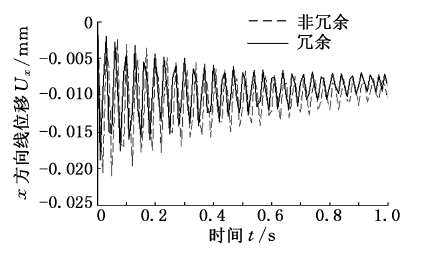
圖5 沿x 軸方向的線位移
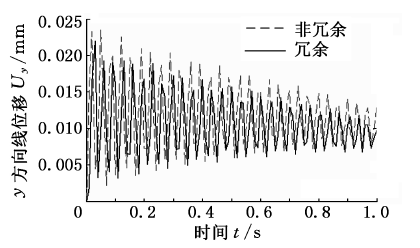
圖6 沿y 軸方向的線位移
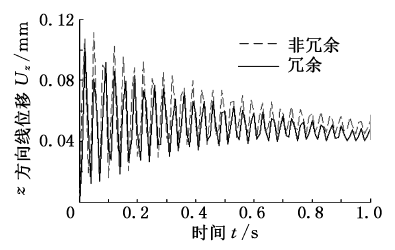
圖7 沿z 軸方向的線位移
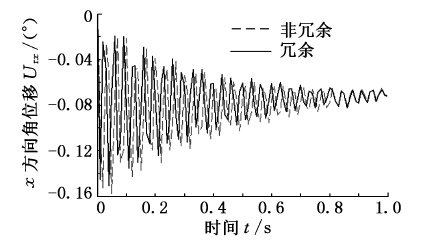
圖8 沿x 軸方向的角位移
比較分析圖5 ~圖10 可知冗余驅(qū)動(dòng)對(duì)機(jī)床整體動(dòng)態(tài)響應(yīng)的影響情況.對(duì)于冗余驅(qū)動(dòng)并聯(lián)機(jī)床,由分支變形引起平臺(tái)中心在x 、y 、z 方向的線/角位移的最大誤差值分別為-0.0189 mm、0.0219 mm、0.1008 mm;- 0.1507°、0.1361°、
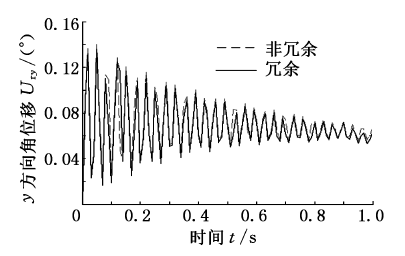
圖9 沿y 軸方向的角位移
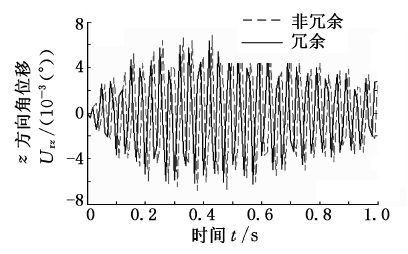
圖10 沿z 軸方向的角位移
0.0064°.而對(duì)于非冗余驅(qū)動(dòng)并聯(lián)機(jī)床,各個(gè)方向的最大誤差值分別為-0.021 mm、0.0236 mm、0.1114 mm;-0.1581°、0.1403°、0.0068°.由此可見(jiàn),無(wú)論是對(duì)于冗余驅(qū)動(dòng)還是非冗余驅(qū)動(dòng)并聯(lián)機(jī)床,最大移動(dòng)誤差均沿z 方向,轉(zhuǎn)動(dòng)方向的最大誤差值均沿x 方向.除此之外,可以看出該冗余驅(qū)動(dòng)并聯(lián)機(jī)床在x 、y 、z 三個(gè)方向的移動(dòng)誤差及x 、y 方向的轉(zhuǎn)動(dòng)誤差均小于其非冗余驅(qū)動(dòng)并聯(lián)機(jī)床,且最大移動(dòng)誤差減小了0.0106 mm,最大轉(zhuǎn)動(dòng)誤差減小了0.042°.因而可以得出冗余驅(qū)動(dòng)可以改善機(jī)床的動(dòng)態(tài)響應(yīng)特性的結(jié)論.
需要說(shuō)明的是,由于各個(gè)方向的實(shí)際位移均以某一數(shù)值為中心往復(fù)波動(dòng),說(shuō)明其動(dòng)平臺(tái)中心點(diǎn)由于各個(gè)驅(qū)動(dòng)分支變形所引起的彈性位移是以某一點(diǎn)為中心的彈性振動(dòng).
2.2 仿真驗(yàn)證
該冗余驅(qū)動(dòng)并聯(lián)機(jī)床的固有頻率由下式得到:
通過(guò)觀察式(13)不難發(fā)現(xiàn),該機(jī)床的整體質(zhì)量矩陣和剛度矩陣均與機(jī)床的位姿相關(guān),因此,計(jì)算了機(jī)床在不同位姿下的固有頻率,并通過(guò)有限元軟件中的模態(tài)分析進(jìn)行驗(yàn)證.圖11 所示為機(jī)床在初始位姿時(shí)各階固有頻率在有限元仿真軟件
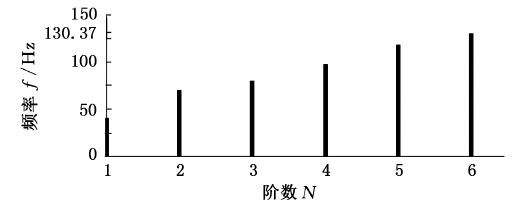
圖1 1 冗余驅(qū)動(dòng)并聯(lián)機(jī)床各階固有頻率仿真結(jié)果
中的計(jì)算結(jié)果,比較分析可知,本文理論模型所得結(jié)果與有限元仿真結(jié)果的變化趨勢(shì)一致,可以在一定程度上證明本文模型的有效性.
3.結(jié)論
(1)本文結(jié)合有限單元法與子結(jié)構(gòu)法推導(dǎo)了5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床的彈性動(dòng)力學(xué)模型.
(2)比較了5-UPS/PRPU 冗余驅(qū)動(dòng)并聯(lián)機(jī)床與其非冗余驅(qū)動(dòng)并聯(lián)機(jī)床的動(dòng)態(tài)響應(yīng)特性.
(3)冗余驅(qū)動(dòng)可以在一定程度上改善冗余驅(qū)動(dòng)并聯(lián)機(jī)床的動(dòng)態(tài)響應(yīng)特性.此外,可以采用本文的方法對(duì)系統(tǒng)結(jié)構(gòu)進(jìn)行優(yōu)化;通過(guò)理論分析找到機(jī)床誤差最小的位置,從而進(jìn)行軌跡規(guī)劃,提高機(jī)床加工精度.
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
博文選萃
| 更多
- 機(jī)械加工過(guò)程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別