



移動式救援機器人機械手臂的自適應控制問題
2017-7-26 來源:遼寧工程技術大學 作者:叢佩超 ,張欣
摘要:分析了移動式救援機器人系統參數存在誤差時 ,其機械臂工作端軌跡的跟蹤控制問題 。 首先基于雅可比矩陣概念與歐拉-拉格朗日方法,建立了移動式救援機器人系統的運動學與動力學模型。 然后,分析了系統的運動學與動力學模型存在誤差時,對于逆動力學控制算法的影響,為了克服這種影響,引入了參數在線識別算法-自適應控制,設計了新的自適應-逆動力學控制算法 。最后 ,通過計算機數值仿真 ,驗證了設計的自適應-逆動力學控制算法的有效性。
關鍵詞:移動式救援機器人;雅可比矩陣;逆動力學控制;
自適應控制移動式救援機器人是機器人學的一個重要分支,由于能夠在各種災害發生時,替代救援人員完成相應任務, 近年來成為國內外眾多學者研究的熱點問題[1-4 ]。移動式救援機器人從廣義上可分為地下、地面、水下、航空和航天移動式救援機器人。其中,地下、地面移動式救援機器人又可分為履帶式、輪式、腿足式及仿人形機器人等。 移動式救援機器人系統主要由移動式基座(輪式/履帶式)、機械手臂、導航系統、視覺系統、控制系統及輔助設備構成。在救援工作中,移動式救援機器人各種具體的操作動作是由其機械手系統完成的。因此,移動式救援機器人系統的機械手臂控制問題,在其眾多關鍵技術中占有非常重要的地位。國內外學者對相關問題進行了大量的研究, 其中比較常見的控制算法有:PD 控制、PID 控制[5-6]、逆動力學控制、變結構控制、模糊控制[7-10]等。
這些控制算法應用的前提條件是: 移動式救援機器人系統及其操作目標的參數精確已知。一旦這一條件無法得到滿足,傳統控制算法的控制特性將出現較大偏差 (工作端軌跡跟蹤出現較大誤差)。為了解決上述問題,需要提出新的控制算法來加以克服。利用雅可比矩陣概念與變分法中的歐拉-拉格朗日方程, 分別建立了移動式救援機器人系統的運動學與動力學方程。基于得到的數學模型,進一步研究了移動式救援機器人系統參數存在誤差時,其工作端軌跡跟蹤控制問題,分析了此時傳統控制算法控制特性所受到的影響。 為了解決這一影響,借助參數在線修正算法-自適應控制, 設計了自適應-逆動力學控制算法。 最后,通過計算機仿真驗證了所設計控制算法的有效性。
1.移動式救援機器人系統的運動學與動力學模型
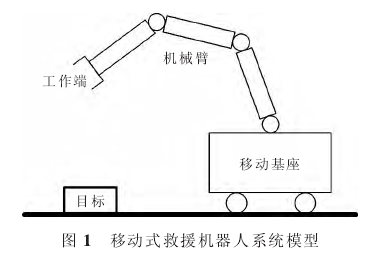
如圖 1 所示, 移動式救援機器人系統主要由移動基座和機械臂組成。
利用旋轉矩陣、 齊次轉換矩陣、D-H 轉換法及雅可比矩陣概念, 建立移動式救援機器人系統的運動學方程,具體形式如下:
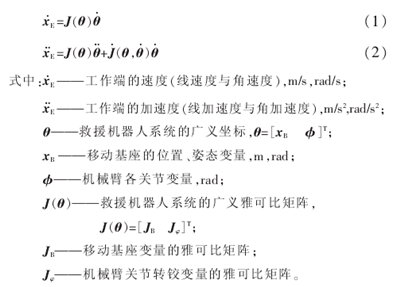
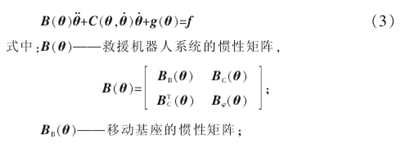
以方程(1)和方程(2)為基礎,利用受非完整約束條件限制的 Lagrange 第二方程,推導出了移動式救援機器人系統的動力學方程:

2.系統參數誤差對逆動力學控制算法的影響
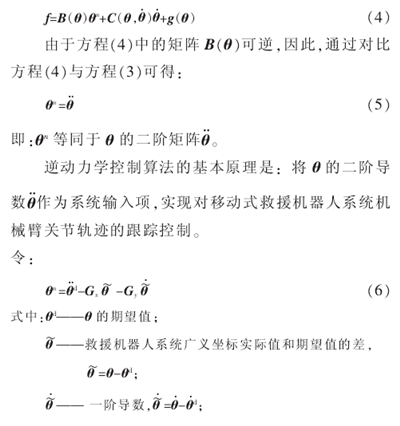
對于移動式救援機器人系統的控制, 主要是通過方程(3)中的控制力項 f 來加以實現,各種不同的控制算法都體現在該力矩項中。 選擇較為常用的一種控制算法———逆動力學控制算法來分析移動式救援機器人系統參數誤差對于傳統控制算法控制特性的影響。 逆動力學控制算法屬于非線性控制算法范疇, 其通用形式如下[11]:

方程(8)是移動式救援機器人系統機械臂關節空間控制的誤差方程。 方程(4)與方程(6)構成了移動式救援機器人系統機械臂的逆動力學控制算法。在移動式救援機器人系統開展救援工作過程中,
利用以上設計的逆動力學控制算法對系統的機械臂進行控制時,需要對系統參數精確掌握,一旦機器人系統所操作的目標參數未知,或系統自身某些參數未知,以上得到的逆動力學控制算法的控制性能將大打折扣,控制精度將無法得到保證。當移動式救援機器人系統出現建模誤差、 計算誤差和操作未知目標等情況時,逆動力學控制算法(方程(4))所依據的系統動力學模型(方程(3))將發生變化,此時,方程(4)變為:
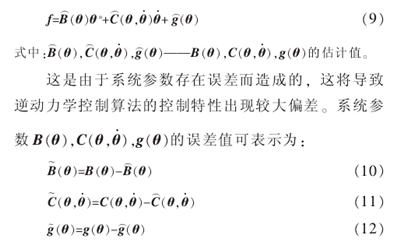
表 1 為一個帶兩關節機械臂的移動式救援機器人系統的參數, 通過該表分析系統參數不確定性對于逆動力學控制算法的影響。 設移動式救援機器人的移動基座質量沒有誤差,精確已知。已知機械各關節質量分別為其真實值的 80%,利用方程(3)、方程(9)與方程(6),借助 MATLAB 軟件進行移動式救援機器人系統的動力學仿真,仿真時間 T=8 s,仿真步長為 0.01 s。仿真結果如圖 2、圖 3 所示。
表 1 移動式救援機器人系統參數
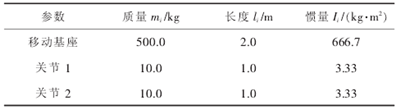


圖 2基座移動時關節軌跡跟蹤誤差、各關節力矩、各轉鉸速度(m0=100 kg)
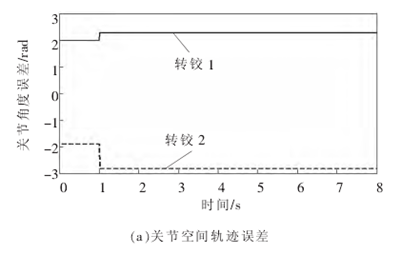

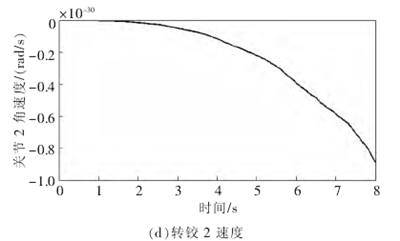
圖 3基座移動時關節軌跡跟蹤誤差、各關節力矩、各轉鉸速度(m0=500 kg)
通過分析計算機仿真結果,可以得出以下結論:當移動式救援機器人系統工作時,由于各種原因,其自身的動力學參數出現誤差, 傳統的逆動力學控制算法的控制特性會出現較大偏差(如圖 2、圖 3 所示)。 在仿真開始階段, 機械臂關節空間期望軌跡的跟蹤誤差穩定在一個較大值附近; 機械臂的驅動力矩保持在 6~7k N·m 之 間 ,這種情況對于驅動電機非常有害 ;與此同時,機械臂各關節轉速也在不斷增大。
3.自適應-逆動力學控制算法
文中分析得到了移動式救援機器人系統參數存在誤差時,逆動力學控制算法的控制特性偏差。為克服這一偏差,首先要找到出現這種控制偏差的原因。將方程(9)代入到方程(3)中得:

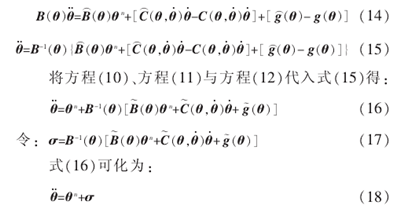
式(17)表示的 σ項就是移動式救援機器人系統的動力學參數誤差項。正是由于它的存在,引起了逆動力學控制算法控制特性的偏差。 研究的自適應控制算法的控制目標是:利用參數在線修正原理,消除不確定項σ對逆動力學控制算法的影響。移動式救援機器人系統的動力學方程可化為如下線性形式[11]:
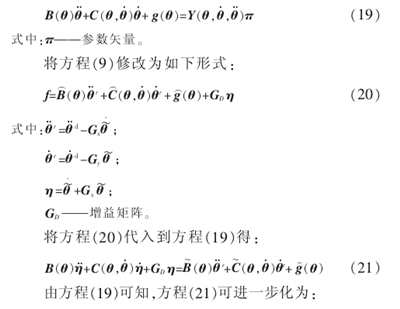
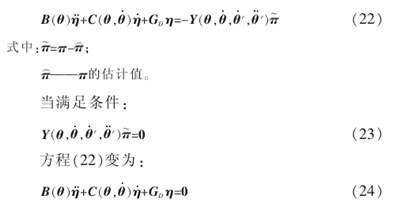
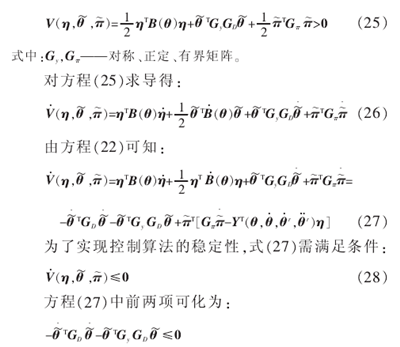
方程(24)是移動式救援機器人系統新的關節軌跡誤差方程。當這一條件成立時,系統參數誤差對于控制算法控制特性的影響消失。 因此,設計新的自適應-逆動力學控制算法的關鍵是找到合適的自適應率, 以滿足上述條件的成立。利用李雅普諾夫判據來確定自適應控制算法的參數自適應率。 首先,選取李雅普諾夫函數為:
4.仿真驗證
仍以表 1 中給出的移動式救援機器人系統模型為例,利用設計的自適應-逆動力學控制算法,對其進行計算機仿真。 仿真時間 T=5 s,仿真步長為 0.01 s,仿真結果如圖 4、圖 5 所示。
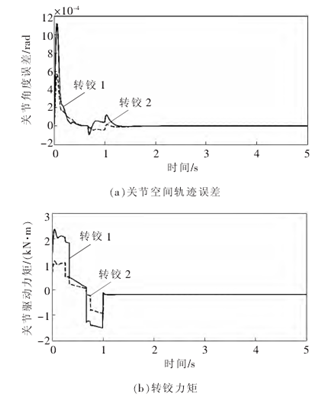

圖 4基座移動時關節軌跡跟蹤誤差、各關節力矩、各轉鉸速度(m0=100 kg)

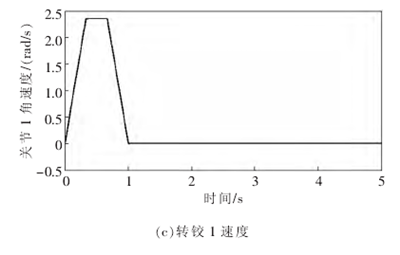
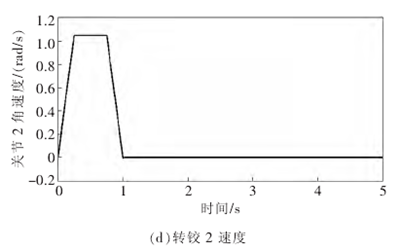
圖 5基座移動時關節軌跡跟蹤誤差、各關節力矩、各轉鉸速度(m0=500 kg)
將以上仿真結果與圖 2、圖 3 的結果進行對比,可以得出如下結論:采用設計的自適應-逆動力學控制算法,無論移動式救援機器人系統的移動基座質量小還是大, 關節軌跡跟蹤誤差均被控制在微小值之內;與此同時,機械臂各關節的速度、 驅動力矩也均被控制在合理的范圍之內,有效地保護了機械臂各關節轉角及其驅動電機。因此, 該控制算法有效地消除了系統動力學模型誤差對于逆動力學控制算法控制特性的影響。
5.結論
研究了移動式救援機器人系統存在參數誤差時,其機械手臂的自適應控制問題,得到如下結論:(1)基于系統的運動學與動力學模型,設計了逆動力學控制算法, 并分析了系統參數誤差對于該控制算法的影響,具體的影響表現為:軌跡跟蹤誤差出現較大偏差,轉鉸速度和驅動力矩變大。(2)針 對上述問題 ,借助自適應控制算法思想 ,將傳統的逆動力學控制算法與自適應控制算法相融合,設計了全新的自適應-逆動力學控制算法,該算法有效地消除了移動式救搖機器人系統參數不確定性對于逆動力學控制算法的影響。(3)通過計算機仿真實例,驗證了控制算法的有效性。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

