



立式銑床加工中心換刀機械手設(shè)計
2023-10-16 來源:大連華銳重工集團 港口機械設(shè)計院 作者:車德曦,孫麒鈞
摘要:本文基于此設(shè)計一款多軸運動的機床快速換刀機械手,首先通過對機床換刀機械手的實際工況和實際運動情況進行分析,確定本次設(shè)計的機械手自由度,然后通過自由度的分析確定機械手的結(jié)構(gòu)形式以及運動方式,進而通過理論力學(xué)的相關(guān)知識,對機械手的關(guān)節(jié)設(shè)計、機械臂的設(shè)計進行計算校核,從而完成機械手的結(jié)構(gòu)設(shè)計,通過本次設(shè)計旨在加強對機械手知識的理解和應(yīng)用能力,以及對機床換刀機械手的發(fā)展提供一定的依據(jù)。
關(guān)鍵詞:結(jié)構(gòu)設(shè)計;機器臂;換刀機械手
1、引言
隨著《中國制造2025》的推進,給新型制造業(yè)提出了新的要求和發(fā)展方向。 工業(yè)5.0的新時代發(fā)展正式基于智能制造的基礎(chǔ)進行發(fā)展起來的,智能化的機器人勢必能夠引起新的技術(shù)產(chǎn)業(yè)革命,目前全球各個國家正在努力地投入更多的時間和精力發(fā)展機械手在各個領(lǐng)域的協(xié)同配合應(yīng)用,旨在提高傳統(tǒng)生產(chǎn)力的發(fā)展,目前機械手是近年來發(fā)展起來的高科技自動化生產(chǎn)設(shè)備。 但是針對復(fù)雜的高級的數(shù)控加工中心的研究和對機械手的配合使用目前還無良好的設(shè)計體系,目前機械手的應(yīng)用主要針對流水線的發(fā)展和應(yīng)用,其主要實現(xiàn)簡單工序的物料搬運和上下料取料,對于采用特定的機床仿形機械手的結(jié)構(gòu)設(shè)計,目前還缺乏相關(guān)的理論參考和具體的實際案例,因此目前世界各國都在加大資金的投入和人才的培養(yǎng),著重發(fā)展與機床配合使用的機械手,因此,機械手的可靠性研究顯得尤為重要,能夠減少人工的勞動作業(yè)強度。
2、總體方案設(shè)計
本次對于機械手的換刀應(yīng)用主要能夠滿足立式加工中心的回轉(zhuǎn)刀片中的換刀設(shè)計,據(jù)此要求機械手的設(shè)計要求能夠滿足多軸的轉(zhuǎn)動和上下移動,并且對于機械手手爪的設(shè)計能夠保證快速換裝,進行滑塊的結(jié)構(gòu)設(shè)計,具有一定的負載要求,在快速移動過程中,機械手能夠保證一定的強度和剛度,并且能夠滿足一定的回轉(zhuǎn)性能,作業(yè)速度高、靈敏度強,并且結(jié)構(gòu)簡單外形尺寸比較小,能夠滿足快速移動和安裝。
2.1 自動換刀動作
換刀的動作是機械手能夠滿足的基本性能要求,因此機械手的動作在于多軸運動方便能夠滿足多方面的功能要求,并且機械手末端手爪的設(shè)計外形結(jié)構(gòu)比較小,能實現(xiàn)對刀庫結(jié)構(gòu)進行配合定位取刀。 機械手在換刀過程中可分為5個動作:抓刀動作、拔刀動作、換刀動作、插刀動作、復(fù)位動作。
2.1.1抓刀動作:換刀機械手在換刀時,首先進行抓刀動作,刀套下轉(zhuǎn)90°,通過信號傳遞到行程開關(guān),發(fā)出抓刀信號。 機械手進行回轉(zhuǎn)動作完成抓刀,完成抓刀動作之后,發(fā)出拔刀信號。
2.1.2拔刀動作:在收到拔刀信號時,機械手臂在受到活塞桿的作用下,進行下降拔刀動作,完成拔刀后,發(fā)出換刀信號。
2.1.3換 刀 動 作: 收 到 換 刀 信 號, 機 械 手 手 爪 旋 轉(zhuǎn)180°,交換刀柄上的刀具和刀庫上的刀具,完成換刀動作,觸發(fā)插刀信號。
2.1.4插刀動作:接收到插刀動作的信號之后,機械手臂下降將刀具放到指定的位置。 插刀完成之后,發(fā)出復(fù)位信號。
2.1.5復(fù)位動作:機械手手爪反向旋轉(zhuǎn),機械臂配合手爪,進行機械手的復(fù)位動作,為下次換刀做好準(zhǔn)備。
2.2 機械手機構(gòu)的設(shè)計
機床機械手主要可分為坐標(biāo)式、圓柱式、球坐標(biāo)式、關(guān)節(jié)型等主要四種方式,其以下對各個類型進行分析已確定本次結(jié)構(gòu)設(shè)計的主要類型:
2.2.1 直角坐標(biāo)機械手結(jié)構(gòu)
直角式坐標(biāo)機械手,其能夠滿足 XYZ三個方向的上下移動,如以下圖所示,其對空間尺寸的占用比較大,并且其運動中采用絲桿進行上下移動,因此運動控制中具有一定的運動精度,但對空間自由的靈活性比較小,運動自由度比較少。
2.2.2 圓柱坐標(biāo)機械手結(jié)構(gòu)
圓柱坐標(biāo)機械手其在結(jié)構(gòu)上相對于直角坐標(biāo)式結(jié)構(gòu)增加了一個基座的回轉(zhuǎn)自由度,其控制精度比較適中。
2.2.3 球坐標(biāo)機械手結(jié)構(gòu)
球坐標(biāo)機械手其結(jié)構(gòu)上增加兩個關(guān)節(jié)處的回轉(zhuǎn)自由度和一個方向的直線移動,其結(jié)構(gòu)簡單制造和加工性比較低,因此在工業(yè)自動化中的應(yīng)用比較少,其控制運動精度比較適用,回轉(zhuǎn)靈活性比較好。
2.2.4 關(guān)節(jié)型機械手結(jié)構(gòu)
關(guān)節(jié)型機械手能夠?qū)崿F(xiàn)三個方向的回轉(zhuǎn),其靈活性比較高,組合回轉(zhuǎn)機構(gòu)能夠?qū)崿F(xiàn)對空間方向上的自由移動,其外形尺寸比較小,因此工業(yè)適應(yīng)性比極高,其機械手的多功能回轉(zhuǎn)性比較高,多用在焊接、裝配、涂裝等多種情況。圖1為四種機械手結(jié)構(gòu)類型,根據(jù)本次的機床換刀要求,其換刀的路徑軌跡并非為固定的單一形式,因此本次結(jié)構(gòu)設(shè)計可采用多功能關(guān)節(jié)型結(jié)構(gòu),能夠同時滿足多方面空間移動,本次設(shè)計根據(jù)查閱機床刀具可得刀具質(zhì)量2-6kg左右,并且對于機械手的外形尺寸結(jié)構(gòu)盡量簡單,機械手的回轉(zhuǎn)控制盡量采用標(biāo)準(zhǔn)化部件進行設(shè)計,減少結(jié)構(gòu)的安裝復(fù)雜性,因此結(jié)構(gòu)可采用電機驅(qū)動,對于速度和力矩控制要求,可采用減速電機,對于回轉(zhuǎn)支撐可采用回轉(zhuǎn)軸承固定安裝,對于機械手自動度要求根據(jù)本次設(shè)計的結(jié)構(gòu)以及機械手具體在工業(yè)中的實際應(yīng)用,本次設(shè)計采用六自由度的結(jié)構(gòu)控制,能夠保證的機床換刀工作中能夠滿足移動、旋轉(zhuǎn),從而保證換刀的精度和速度。
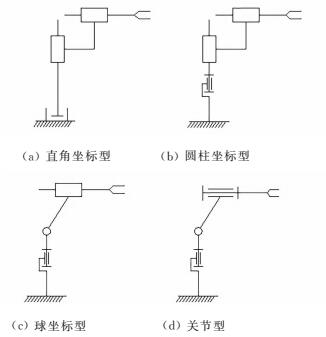
圖1 機械手結(jié)構(gòu)類型
3、機械結(jié)構(gòu)設(shè)計
3.1 基本尺寸的設(shè)計
在設(shè)計中,各個部件與電動機、減速器配合連接,故依據(jù)常用電動機和減速器的基本尺寸對整個換刀機械手裝置進行設(shè)計,并確定其基本尺寸如圖2所示。
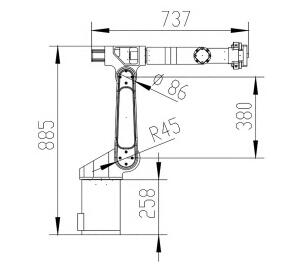
圖2 基本尺寸示意
3.2 主要零部件的設(shè)計
3.2.1 底座的設(shè)計
底座在整個裝置中的功能有兩個,一是作為機械手的底座,起承載整個機械手的作用,二是機械手底座與機床的連接作用,固定在機床上。
在設(shè)計時,底座為空腔,將減速器和電動機裝入底座的內(nèi)部,作為驅(qū)動源,因此底座的尺寸依據(jù)電動機外形尺寸進行設(shè)計。 在底座上端應(yīng)留有兩個凸臺,上凸臺留有4個 M4的螺栓孔,通過支撐軸承與大臂座進行連接,下凸臺留有4個 M5的螺栓孔,與電動機和減速器連接。
3.2.2 大臂座的設(shè)計
大臂座是連接底座與大臂的中間裝置,首先需要與底座進行固定連接,在大臂座底端留有4個 M4的螺栓孔,通過支撐軸承與大臂座連接。 大臂座的旋轉(zhuǎn)需要底座內(nèi)部的電動機輸出動力,因此在設(shè)計時,底端留有3×3×10的鍵槽,與減速器進行連接。
在大臂座右端應(yīng)裝入電動機和減速器,右端孔的大小為114mm,深度為80mm,在孔的一側(cè)應(yīng)留有凸臺,其大小與底座凸臺大小一致。
3.2.3 大臂的設(shè)計
大臂是底座與上部機械手執(zhí)行機構(gòu)連接的樞紐,大臂大端圓弧半徑為55mm,大端處留有4個 M5的螺栓孔與大臂座的支撐軸承進行連接。大臂小端圓弧半徑為42mm,留有4個 M5的螺栓孔與小臂座進行連接固定。大臂總長477mm,具體設(shè)計如圖3所示。
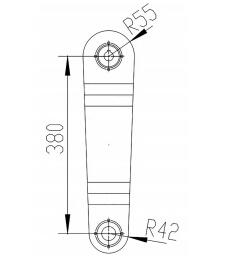
圖3 大臂
3.2.4 小臂的設(shè)計
小臂是連接大臂與腕部的中間樞紐部件,小臂后端與大臂安裝的電動機、減速器裝置相連接,前端通過支撐軸承與腕部連接,小臂可通過電機進行360°的回轉(zhuǎn)運動。 設(shè)計小臂總長 380mm, 寬 120mm。 小臂兩側(cè)設(shè)計半徑為34mm 的孔,通過4個 M4的螺栓與腕部相連接,具體設(shè)計如圖4所示。
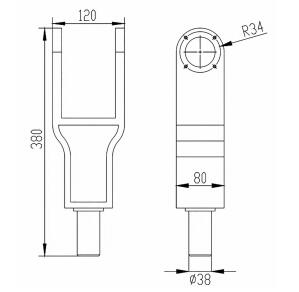
圖4 小臂
3.2.5 腕部的設(shè)計
腕部是連接手爪與小臂的中間體,其內(nèi)部裝有電動機和減速器,腕部兩側(cè)分別設(shè)計高為15mm、25mm,直徑為30mm 的凸臺,通過滾動軸承與小臂進行連接。 腕部前端留有凸臺,并在凸臺上留有4個 M5的螺栓孔,與手爪凸臺機構(gòu)連接。
3.3 夾持機構(gòu)設(shè)計
夾持機構(gòu)通過張合對刀具進行夾緊和放松動作,由手爪上的夾齒對刀具進行夾持。
手爪對刀具的夾緊力可以按下式計算:
根據(jù)以上計算,對具體結(jié)構(gòu)進行設(shè)計,如圖5所示:
圖5 刀柄夾持機構(gòu)
3.4 主要材料的選擇
在本次設(shè)計中,電動機選擇輕型塑料外殼所制造的類型,機械臂使用6個電動機和減速器來完成驅(qū)動,使用塑料外殼制造的能夠極大的減少整體自重,可以減輕驅(qū)動過程中的損耗。
結(jié)合材料需要輕量化的思路,在完全達到強度參數(shù)的同時,還應(yīng)分析質(zhì)量造成的影響,以及經(jīng)濟性、便利性等多個關(guān)鍵因素。 選擇5000系列鋁合金材料,鎂含量在3~5%之間,常稱為鎂鋁合金,具有密度低,抗拉強度高,延伸性能好。
4、換刀機械手的建模
換刀機械手的重要工作就是完成機床的自動換刀動作,因此機械手對其運動具有較高的要求,如果只有計算而不設(shè)計三維模型很難想象具體的機械手結(jié)構(gòu)空間以及具體動作形式,因此需要通過 SolidWorks三維建模軟件對換刀機械手的主要大致結(jié)構(gòu)進行繪制三維模型,并通過相關(guān)模擬裝配將結(jié)構(gòu)進行具體表達,傳統(tǒng)的二維輔助軟件其內(nèi)容不夠,形式只能夠進行輔助加工,采用直觀的三維造型不僅能夠直觀表達各個主要結(jié)構(gòu)之間的位置關(guān)系,而且還能夠?qū)λO(shè)計尺寸進行檢查修正以保證設(shè)計能夠滿足使用要求,而且后續(xù)為了能夠更好的模擬其運動狀態(tài)三
維模型也是一個重要的基礎(chǔ)環(huán)節(jié)。
5、結(jié)論
本次機械手的結(jié)構(gòu)設(shè)計主要通過步進電動機結(jié)合減速器進行關(guān)節(jié)動作,對于夾爪結(jié)構(gòu)主要通過夾爪進行張開閉合。 通過對換刀動作的分析,確定雙臂回轉(zhuǎn)式機械手作為設(shè)計模型。 對機械手整體機構(gòu)設(shè)計,依照換刀路徑軌跡確定多功能關(guān)節(jié)型機械臂。 預(yù)期設(shè)計六自由度換刀機械手,確定換刀機械手的參數(shù)以及各關(guān)節(jié)的回轉(zhuǎn)范圍。 通過刀柄夾持機構(gòu)的夾緊力進行計算,根據(jù)計算結(jié)果設(shè)計手爪夾持機構(gòu)。 以機械手腕部為例,進行腕部扭矩的計算和校核,選取對應(yīng)的電動機和減速器,并對其他部件進行電動機和減速器的選型。 確定鋁合金為主要材料,并根據(jù)電動機、減速器與各個部件的配合尺寸對各個部件進行基本尺寸的 設(shè) 計。其中底座高258mm, 大臂兩端中心距為280mm,小臂和腕部總長737mm。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況