


七軸四聯動數控環面蝸桿磨床的研制
2018-8-27 來源: 重慶商務職業學院出版傳媒系, 四川大學 作者:陳燕,龔玉霞
摘要: 環面蝸桿加工的低精度和低效率問題,成為制約環面蝸桿發展的主要因素。針對精密磨削平面包絡環面蝸桿和錐面包絡環面蝸桿,運用虛擬中心距加工原理,研發了七軸四聯動數控環面蝸桿磨床。工件在機床上只需一次裝夾即可自動完成左右齒面的磨削。操作者不需要手動編程,只需在磨削軟件中輸入工件參數,即可自動生成加工程序。在研制的數控環面蝸桿磨床上進行平面包絡環面蝸桿的試切實驗,結果表明研制方案可行、精度可達預期要求。
關鍵詞: 環面蝸桿; 虛擬中心距; 機床研制; 數控環面蝸桿磨床
環面蝸桿具有多齒接觸、承載能力強、傳動效率高等優點,在工業中發揮著越來越重要的作用。國內外專家學者在加工方法、制造精度、檢測技術及加工設備研制等方面做了大量研究。早在 20 世紀 90 年代,文獻 [1 - 3] 中針對如何提高平面包絡環面蝸桿的加工精度和加工效率做了探討。文獻 [4 - 7]中對環面蝸桿的誤差檢測方法及檢測儀做了深入研究。文獻 [8 - 9] 中對蝸桿磨床及數控系統進行了設計和研制,但研制的設備在加工精度和加工軸聯動方面都受限。因此,如何提高蝸桿的加工精度和加工效率,仍然是制約環面蝸桿發展的主要因素。
針對精密磨削平面包絡環面蝸桿和錐面包絡環面蝸桿,研發了七軸四聯動數控環面蝸桿磨床。工件在機床上只需一次裝夾即可自動完成左右齒面的磨削,但左右齒面需分別磨削。機床運用虛擬中心距加工原理,通過參數設定可實現基圓尺寸和中心距尺寸的調整。操作者不需要手動編程,只需在磨削軟件中輸入工件參數,即可自動生成加工程序。
1 、虛擬回轉中心加工原理
傳統的環面蝸桿加工方法是在改裝的滾齒機或車床上進行展成加工,要求機床中心距必須與環面蝸桿成形中心距一致,因此機床工作能力受到中心距的限制。為了解決這一矛盾,重慶大學張光輝教授提出虛擬回轉中心原理,并開發了具有虛擬回轉中心功能的四軸四聯動環面蝸桿磨床,實現了小中心距機床加工大中心距環面蝸桿齒面的目的。經深入分析和研究,發現有值得進一步改進的地方,為此針對精密磨削平面包絡環面蝸桿和錐面包絡環面蝸桿,提出了一種基于虛擬中心的七軸四聯動數控環面蝸桿磨床。如圖 1 所 示, 平 面 圖 形 MN1N2在 中 間 平 面x2O2y2中有且僅有 3 個自由度,即沿 x2和 y2方向的平動及繞基點 M 的轉動。選取 3 個獨立參數表示其自由度,即基點 M 在 x2O2y2中的坐標值 xM和 yM,以及 MN2與坐標軸 O2x2的夾角 φ,顯然,這 3 個參數均為時間 t 的函數,故可表示為:
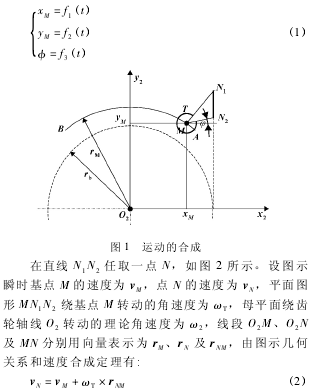
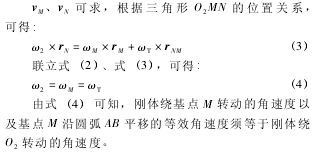
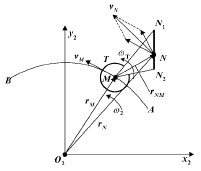
圖 2 速度的合成
可見,直線 N1N2繞蝸輪軸線 O2以角速度 ω2的回轉運動,可以分解為直線 N1N2繞與其固聯的任意基點 M 以角速度 ω2的回轉運動、基點 M 沿以 O2為圓心以 rM為半徑的圓弧曲線的平移運動,該平移運動可分解為沿兩正交直線軸的平移運動。虛擬回轉中心的運動過程,需要 3 個坐標軸的聯合運動來實現。
2 、蝸桿磨床研制方案
2. 1 蝸桿磨床的運動軸
數控環面蝸桿磨床的運動軸如圖 3 所示,七軸分別為: X 軸,拖板的橫向運動; Y 軸,磨具的高度調整運動; Z 軸,工作臺的縱向運動; A 軸,砂輪傾角的調整運動; B 軸,砂輪架的回轉運動; C軸,工件的旋轉運動; SP 軸,砂輪的旋轉運動。X、Y、Z 軸配置光柵尺,精度為 ± 3 μm; A、B、C 軸配置角度編碼器,精度為 ± 5″。
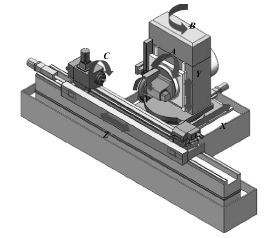
圖 3 機床運動軸示意圖
機床的主運動為砂輪的旋轉運動 ( SP 軸) 。砂輪主軸采用滾動軸承結構形式,滾動軸承采用高精度陶瓷球主軸軸承,并配置油霧潤滑裝置。砂輪的旋轉運動由 SIEMENS 內裝式電機驅動,可實現砂輪的恒線速度控制。內裝式電機通過精密水冷機進行強制冷卻。機床的磨削運動: 工作臺的縱向運動 ( Z 軸) 、拖板的橫向運動 ( X 軸) 、砂 輪架的回 轉運動 ( B軸) 、工件的旋轉運動 ( C 軸) 。4 個運動均為全閉環控制的伺服軸,由數控系統控制實現四軸聯動,完成工件的磨削。Z 軸和 X 軸均由交流伺服電機經行星齒輪減速機,通過彈性聯軸器、高精度滾珠絲杠副實現縱向和橫向運動,通過光柵尺實現全閉環控制。B 軸由力矩電機直接驅動,C 軸由交流伺服電機經高精度蝸輪蝸桿副 驅 動,均 通 過 角 度 編 碼 器 實 現 全 閉 環控制。
機床的調整運動運動: 砂輪傾角的調整運動 ( A軸) ,磨具的高度調整運動 ( Y 軸) 。砂輪傾角的調整運動由力矩電機直接驅動,通過角度編碼器實現全閉環控制。磨具高度的調整運動則由交流伺服電機經過一級減速,驅動高精度滾珠絲杠副實現磨具的高度調整,通過光柵尺實現全閉環控制。
砂輪修整: 修整工具采用金剛碟輪,通過工作臺的縱向運動 ( Z 軸) 和拖板的橫向運動 ( X 軸) 兩軸聯動實現平面包絡環面蝸桿和錐面包絡環面蝸桿磨削所用砂輪的修整。
2. 2 蝸桿磨床的主要規格參數
研制好的數控環面蝸桿磨床如圖 4 所示。配置SIEMENS 840Ds L 高檔數控系統、南京貝其爾公司的潤滑系統; 配備英國雷尼紹公司的對刀測頭,自動確定環面蝸桿中心平面的軸向位置; 配備意大利馬波斯公司的砂輪動平衡裝置,可對砂輪進行精確平衡。冷卻系統配置磁性分離器和離心過濾器實現二級過濾,有效過濾砂灰及鐵屑,保證了冷卻液的清潔。配置全封閉式大罩殼,安裝了油霧處理器,以防止冷卻液的飛濺及油霧對環境的污染。磨削蝸桿可達到的精度等級為 5 級 ( GB/T 16445-1996) ,但工件兩端的中心孔需要研磨,其主要規格參數如下: 最大安裝直徑 320mm; 最大頂尖距 1 500 mm; 最小頂尖距 150 mm; 可磨蝸桿中心距 63 ~ 400 mm; 可磨蝸桿外徑 30 ~320 mm; 可磨蝸桿齒根直徑 20 ~ 280 mm; 蝸桿圓弧中心至軸承擋端面距離 50 ~ 400 mm; 可磨螺紋長度1 000 mm; 可磨蝸桿模數 1. 2 ~ 20; 可磨蝸桿頭數 1 ~ 20; 砂輪最大傾角為 ± 30°; 砂輪最大線速度45 m / s; 砂 輪 外 徑 500 ~ 420 mm; 砂 輪 厚 度 40mm; 可磨蝸桿最大質量 500 kg。

圖 4 數控環面蝸桿磨床
3 、試切實驗
以表 1 所示幾何參數為例,在研制后的數控環面蝸桿磨床上磨削加工蝸桿齒面,磨削加工流程如圖 5所示,磨削加工的平面包絡環面蝸桿樣件成品如圖 6所示。
表 1 蝸桿幾何參數
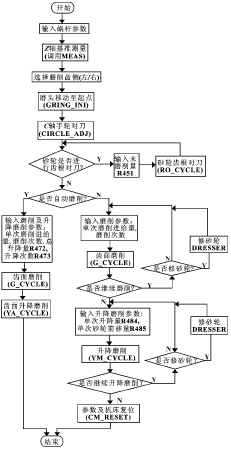
圖 5 磨削流程

圖 6 平面包絡環面蝸桿磨削成品
4 、結論
(1) 針對精密磨削平面包絡環面蝸桿和錐面包絡環面蝸桿,研制了一種基于虛擬中心的七軸四聯動數控環面蝸桿磨床。(2) 在研制的數控環面蝸桿磨床上進行平面包絡環面蝸桿的試切實驗,結果表明研制方案可行、精度可達預期要求。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

