


摘要:AICEYA760 銑床存在機(jī)床線路老化,阻容元件變值,小型直流繼電器特別是雙狀態(tài)直流繼電器工作不穩(wěn)定,繼電器觸頭容量小且觸點接觸不良問題。給出改造方案并加以實施。
關(guān)鍵詞AICEYA760 銑床電氣系統(tǒng)改造
中航工業(yè)陜西飛機(jī)工業(yè)集團(tuán)有限公司機(jī)械動力公司AICEYA760 型銑床是法國20 世紀(jì)70 年代產(chǎn)品,機(jī)床結(jié)構(gòu)緊湊,機(jī)械化和自動化程度較高,一直以來都是公司加工飛機(jī)復(fù)雜鋁合金零件的主要設(shè)備。由于使用時間較長,近年來設(shè)備故障不斷,嚴(yán)重影響公司正常生產(chǎn)任務(wù)。為此,在詳細(xì)分析設(shè)備故障原因后,對其進(jìn)行維修改造,恢復(fù)了設(shè)備原有功能。
一、問題的提出
經(jīng)分析,該銑床故障與機(jī)械部分結(jié)構(gòu)沒有太大關(guān)系,機(jī)床主要功能基本由電氣控制實現(xiàn),電氣控制線路復(fù)雜,控制元件采用大量小型直流繼電器和雙狀態(tài)直流繼電器,控制線路中采用大量阻容回路。由于使用時間長,機(jī)床線路老化,阻容元件變值,小型直流繼電器特別是雙狀態(tài)直流繼電器工作不穩(wěn)定,繼電器觸頭容量小且觸點接觸不良,造成機(jī)床故障頻繁。此外,機(jī)床電氣系統(tǒng)中的元器件國產(chǎn)元件無法替代,設(shè)備長期得不到有效的維護(hù)修理,也是設(shè)備的使用狀態(tài)逐漸惡化的主要原因。由于設(shè)備故障主要由電氣控制系統(tǒng)引起,因此必須對其進(jìn)行改造。改造原則是簡化機(jī)床控制線路,保留原機(jī)床的電機(jī)及部分限位開關(guān),廢除原機(jī)床的線路及元件,重新設(shè)計機(jī)床的主線路與控制線路,機(jī)床元器件全部選用國產(chǎn)件,增強(qiáng)其互換性,方便今后維修。
二、改造實施
AICEYA760 型銑床動力系統(tǒng)由3kW 主軸電機(jī)、1.47kW 工作臺拖動電機(jī)和0.1kW 冷卻泵電機(jī)組成。主控回路見圖1,主軸電機(jī)M1 由交流接觸器KM1 控制運行,冷卻泵電機(jī)則由轉(zhuǎn)換開關(guān)QS2 控制運行,工作臺拖動電機(jī)M3 由交流接觸器KM2與KM3 控制正反向運行。機(jī)床電源由轉(zhuǎn)換開關(guān)QS1 控制其接通與斷開,考慮到維修方便,具有良好的互換性,KM1 與KM2、KM3 均選用國產(chǎn)CJO-10 型380V 接觸器。在程序控制部分的繼電器,均采用MY4N 型24V 直流繼電器,該型繼電器體積小,而觸頭容量大,工作可靠,有助于機(jī)床穩(wěn)定運行。整個機(jī)床的控制回路大體可分兩大部分即主軸電機(jī)的控制與工作臺拖動電機(jī)的控制。
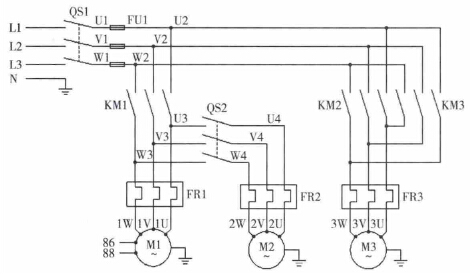
圖1 AICEYA760 型銑床主控回路
1.主軸控制(圖2)
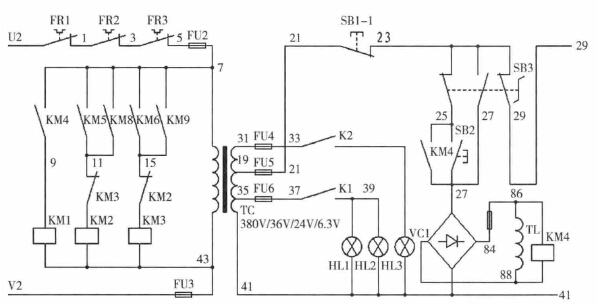
圖2 AICEYA760 型銑床主軸控制
合上轉(zhuǎn)換開關(guān)QS1,機(jī)床接通電源,變壓器TC 得電,其輸出端有電壓輸出,此時按下啟動按鈕SB2,硅整流器VC1 的輸入端有24V 交流電壓輸入,同時其輸出端輸出24V 直流電壓,主軸電機(jī)剎車線圈TL 得電,主軸電機(jī)M1 制動釋放,同時直流繼電器KM4 線圈得電吸合,25 與27 間常開觸點KM4 閉合自保,而7 與9 間常開觸點閉合,使接觸器KM1 線圈得電吸合,KM1 主觸頭動合接通電機(jī)M1 啟動運轉(zhuǎn),形成兩個控制回路:①21→SB1→23→SB3→25→SB2 (KM4)→27→VC1→TL(KM4)②U2→FR1→1→FR2→3→FR3→5→FU2→7→KM4→9→KM1→43→FU3→V2。主軸電機(jī)帶有制動機(jī)構(gòu),其制動釋放線圈電源為直流24V,將制動釋放線圈TL 與繼電器KM4 線圈并聯(lián),這樣可保證主軸電機(jī)啟動前電機(jī)制動機(jī)構(gòu)釋放,而在主軸電機(jī)停止時,電機(jī)制動釋放線圈TL 與繼電器KM4 線圈同時失電,實現(xiàn)主軸電機(jī)制動。在主軸變速手柄旁邊裝有按鈕SB3,其主要功能:①可對主軸電機(jī)進(jìn)行點動,使變速時齒輪易于嚙合;②可對主軸電機(jī)進(jìn)行啟動;③可對主軸電機(jī)進(jìn)行停止控制,這些功能都為機(jī)床的操作帶來方便。
2.工作臺的控制
(1)工作臺縱向左右運動。由交流接觸器KM2、KM3 控制電機(jī)M3 的正反轉(zhuǎn)實現(xiàn),而接觸器KM2 與KM3 的工作則由繼電器KM5 與KM6 來控制。工作臺縱向的工作進(jìn)給與快速移動則由手柄開關(guān)SA1-4 控制,分別由工作進(jìn)給離合器EL1 與快速移動離合器RL1 來實現(xiàn)。
①工作臺向右。將工作臺縱向控制手柄SA1 扳置“向右”位置時,手柄開關(guān)SA1-2 閉合,繼電器KM5 線圈得電吸合,其7與11 之間常開觸點KM5 閉合,接觸器KM2 線圈得電吸合,拖動電機(jī)M3 正向啟動運行。同時繼電器KM5、8 與28 之間常開觸點閉合,電磁離合器EL1 得電,工作臺向右做工作進(jìn)給,而10與12 之間常開觸點KM5 閉合,實現(xiàn)自保,其控制回路為:8→SA1-1→10→SA1-2→12→SQ1→14→SQ2→16→KM6→18→KM5→2。當(dāng)需要工作臺快速向右移動時,只需將縱向控制手柄SA1 扳置“快速”位置,手柄開關(guān)SA1-4 斷開工作離合器EL1 電源,同時接通快速離合器RL1 電源,并配合機(jī)械的轉(zhuǎn)換,這時工作臺將快速向右移動,當(dāng)松開快速手柄后,其手柄開關(guān)SA1-4則斷開快速離合器RL1 電源,同時又接通工作離合器EL1 的電源,工作臺仍將做向右工作進(jìn)給,當(dāng)需要停止時,只要將手柄開關(guān)SA1 扳置“停止”位置,手柄開關(guān)SA1-1 斷開電源,繼電器KM5 線圈失電釋放,進(jìn)給電機(jī)與離合器同時停止工作,工作臺向右運動停止。
②工作臺向左。工作臺向左運行與工作臺向右運行原理相同,只要將縱向控制手柄SA1 扳置“向左”位置時,10 與20 之間手柄開關(guān)SA1-3 閉合,繼電器KM6 線圈得電吸合,控制工作臺向左運動,其控制回路為:8→SA1-1→10→SA1-3→20→SQ3→22→SQ4→24→KM5→26→KM6→2,其中10 與20 之間KM6 的常開觸點為繼電器KM6 自保。
(2)工作臺的垂直運動。工作臺垂直方向上下運動由繼電器KM8 與KM9 來控制實現(xiàn),其中工作進(jìn)給與快速移動則由垂直控制手柄控制其工作離合器EL2 與快速離合器RL2 的得電與失電實現(xiàn)。另外工作臺做垂直方向運動時,須將垂直/橫向選擇開關(guān)扳置“垂直”位置,這時選擇開關(guān)SA4 接通,繼電器KM7 得電工作,工作臺方可作垂直方向的運動。
①工作臺向下。將工作臺垂直向手柄SA2 扳置“向下”位置時,手柄開關(guān)SA2-2 接通,繼電器KM8 線圈得電吸合,其7 與11 之間常開觸點KM8 閉合,接觸器KM2 線圈得電吸合,電機(jī)M3 得電正向啟動運行,同時8 與74 之間常開觸點KM8 閉合,電磁離合器EL2 得電,這時工作臺向下做進(jìn)給運動,其控制回路為:8→KM7→36→SQ13→SQ14→38→SA2-1→40→SA2-2→42→KM7→44→SQ5→46→SQ6→52→KM9→54→KM8→2,繼電器KM8 通過40→V1→45→KM8→42 回路實現(xiàn)自保。當(dāng)需要工作臺快速下降時,只需將垂直控制手柄SA2 扳置“快速”位置,手柄開關(guān)SA2-4 斷開工作離合器EL2 電源,同時接通快速離合器RL2 電源,這時工作臺將快速向下移動,當(dāng)松開快速手柄后,其手柄開關(guān)SA2-4 則斷開快速離合器RL2 電源,同時接通工作離合器EL2 電源,工作臺將仍做向下工作進(jìn)給。當(dāng)需要工作臺運行停止時,只要將手柄SA2 扳置“停止”位置,手柄開關(guān)SA2-1 斷開電源,繼電器KM8 線圈失電釋放,進(jìn)給電機(jī)與離合器同時停止工作,工作臺向下運行停止。
②工作臺向上。工作臺向上的控制原理與工作臺向下的控制原理相同,將垂直控制手柄SA2 扳置“向上”位置時,40 與60之間手柄開關(guān)SA2-3 接通,繼電器KM9 得電吸合,7 與15 之間KM9 常開觸點閉合,接觸器KM3 線圈得電吸合,電機(jī)M3 反向啟動,拖動工作臺向上運行,其控制回路為:8→KM7→36→SQ13→SQ14→38→SA2 -1→40→SA2 -3→60→KM7→62→SQ9→64→SQ10→70→KM8→72→KM9→2;繼電器KM9 通過40→V2→47→KM9→60 回路實現(xiàn)自保。
(3)工作臺的橫向運動。工作臺的橫向運動與工作臺垂直運動的控制原理基本相同,工作臺橫向運動時需要將工作臺垂直/橫向選擇手柄扳置“橫向”位置,其選擇開關(guān)SA4 斷開繼電器KM7 線圈電源,KM7 失電,其觸點釋放復(fù)位,這時工作臺可做橫向運動。
①工作臺向前。將工作臺橫向控制手柄SA3 扳置“向前”位置時,手柄開關(guān)SA3-3 接通繼電器KM8 線圈得電吸合,電機(jī)M3 正向啟動運轉(zhuǎn)帶動工作臺向前運行,其控制回路為:8→KM7→56→SA3-1→58→SA3-3→42→KM7→48→SQ7→50→SQ8→52→KM9→54→KM8→2;繼電器KM8 通過58→V3→45→KM8→42 回路實現(xiàn)自保,工作臺的工作運行與快速移動通過手柄開關(guān)SA3-4 控制實現(xiàn)。
②工作臺向后。工作臺向后運行與向前運行原理相同。其控制回路為:8→KM7→56→SA3-1→58→SA3-2→60→KM7→66→SQ11→68→SQ12→70→KM8→72→KM9→2;繼電器KM9通過58→V4→47→KM9→60 回路實現(xiàn)自保。
工作臺的運行是通過控制工作臺拖動電機(jī)的正、反向運行,以及控制工作離合器與快速離合器的得電與失電并與機(jī)械配合實現(xiàn)了工作臺6 個方向的工作進(jìn)給與快速移動。而工作臺的進(jìn)給速度則有機(jī)械上不同齒輪的相互嚙合實現(xiàn)。
此外,在機(jī)床電氣線路的設(shè)計中,設(shè)置了熔斷器FU1~FU8對機(jī)床的主回路和各種控制回路做短路保護(hù),而主軸電機(jī)、冷卻泵電機(jī)及工作臺拖動電機(jī),則分別由接觸器KM1 與KM2、KM3 進(jìn)行欠壓與失壓保護(hù),由熱繼電器FR1、FR2 及FR3 進(jìn)行過載保護(hù)。并在線路中設(shè)置限位開關(guān)SQ13 與SQ14 作為手動工作臺垂直升降搖把的安全保護(hù)。限位開關(guān)SQ1 與SQ3、SQ5與SQ7、SQ9 與SQ11 做工作臺縱向向右與向左,垂直方向向下與向上,橫向向前與向后的工作限位,SQ2 與SQ4、SQ6 與SQ8、SQ10 與SQ12 為工作臺縱向向右與向左,垂直方向向下與向上,橫向向前與向后的終點限位,從而保證了機(jī)床運行安全可靠。
此次對機(jī)床的成功改造,證明早期購買的外國機(jī)床,大部分設(shè)備技術(shù)狀態(tài)還是較好的,只是在維修時由于缺乏相關(guān)備件,才導(dǎo)致設(shè)備不能正常使用,淘汰十分可惜。如果能夠利用自身技術(shù)加上國產(chǎn)可替代的零部件及元器件,將這些舊設(shè)備加以改造,完全可以恢復(fù)其生產(chǎn)能力,給企業(yè)節(jié)省大量經(jīng)費。
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com

查")
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時代,少談點智造,多談點制造
- 現(xiàn)實面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別