



基于于PLC的數控車床與工業機器人上下料系統集成改造
2021-5-20 來源: 江蘇工程職業技術學院 作者:丁錦宏
摘要:采用數控機床與工業機器人組成集成系統進行機械零件的自動加工與上下料是智能制造的基礎。針對配備 FANUC 數控系統的車床,使用 ABB工業機器人進行自動上下料,提出基于 PLC的系統集成方案。在對數控車床進行局部改造的基礎上,規劃系統協調運行的工作流程和接口信號,繪制系統連接圖,并設計系統程序,實現系統的集成改造。
關鍵詞:工業機器人; 數控車床; 集成; PLC
工業機器人是面向工業領域的多自由度的機器人,在汽車制造等行業應用廣泛。機器人與數控機床集成系統,能自動上下料,成為智能制造行業的發展趨勢。機器人上下料集成系統通常利用網絡進行信號傳遞,這種方法適用較復雜的制造系統,可使外部聯線簡單化,但系統可維護性不佳[
1]。在數控機床與機器人之間增加PLC,不僅可以傳遞信號,還能減少數控機床與機器人之間的信號傳遞數量,從而增加系統的可維護性。筆者以某企業使用的數控車床加工重量10 kg的零件為例,利用工業機器人進行系統集成改造。
1 、系統組成
選用 ABB 工業機器人與數控車床(以下簡稱“CNC”)進行系統集成,使兩者協調運行,由機器人完成工件的上下料。組成集成系統的數控車床和機器人分別是 2 個獨立的設備。數控車床配備 FANUC-0IT數控系統。機器人型號為 IRB-1600-10-1.2,承載能力為 10 kg,工作半徑達 1.2 m。機器人末端加裝用于夾持工件的手爪。本實例中,加工工件為圓柱體,根據其形狀、尺寸、質量選擇型號為 HDS-32Y 的夾緊氣缸作為手爪,控制手爪動作的電磁閥安裝在機器人本體上,由機器人進行控制。改造時,使用兩條傳輸帶(分別用于毛坯和成品的輸送)。傳輸帶由三相異步電機驅動,并設有物料檢測傳感器。工業機器人數控車床上下料系統見圖1。
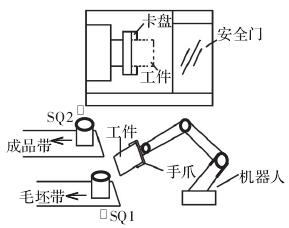
圖1 系統組成
2 、數控車床改造
系統集成時,需要將數控車床的安全門改造成自動打開及關閉,將卡盤改造成自動夾緊及松開。該方案采用氣動原理進行安全門和卡盤的控制改造。選擇滿足行程的氣缸安裝在車床防護罩上,并與安全門進行連接,控制其打開與關閉。將原有手動卡盤拆除,重新選擇并安裝合適的氣動卡盤。安全門和卡盤的氣動控制回路見圖 2。
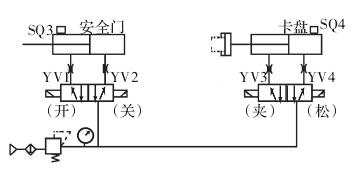
圖2 安全門和卡盤的控制
圖 2中,YV1和 YV2用于控制安全門的打開與關閉,SQ3為安全門關閉狀態的檢測開關。YV3和YV4用于控制卡盤的夾緊與松開,SQ4為卡盤松開狀態的檢測開關。集成時,通過PLC控制安全門和卡盤并檢測它們的狀態。
3、 系統集成方案
在數控機床與機器人之間增加PLC對輸入輸出信號進行邏輯處理,完成信號傳遞與運行協調[2],并控制傳輸帶、安全門與卡盤。該方案選用三菱FX3u-24MR型PLC。機器人、PLC、CNC之間的信號傳遞關系見圖3。
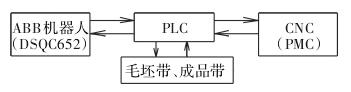
圖3 系統集成方案
在ABB機器人中,通過輸入輸出板DSQC652來接收與發送信號,該板具有16個數字量輸入通道和16個數字量輸出通道,輸入地址為DI1~DI16,輸出地址為DO1~DO16。數控車床通過FANUC數控系統內置的PLC進行信號的輸入輸出,為區別系統集成時使用的PLC與CNC內置的PLC,此處將CNC內置PLC稱為PMC,輸入地址的表示形式為X*.*,輸出地址的表示形式為Y*.*。
3.1 系統工作流程規劃
機器人與數控車床協調運行的工作流程規劃涉及機器人的運行過程劃分、兩者之間的信號傳遞,是系統集成的關鍵[3]。分析對比幾種方案后,確定系統工作流程規劃如圖4所示。
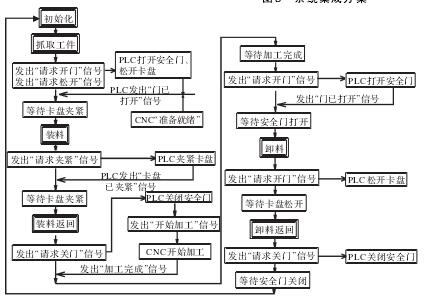
圖4 工作流程規劃
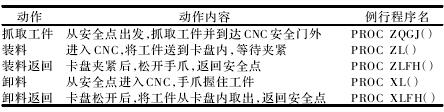
因使用了 PLC 直接控制安全門、卡盤以及傳送帶,數控車床與機器人的信號傳遞數量大大減少。圖4中,雙線框內的內容為機器人的運行動作,即將機器人上下料過程分為5個動作,按照機器人運行軌跡及其手爪動作編制相應的例行程序,由主程序調用[4],動作內容、例行程序名見表1。
表1 機器人例行程序
3.2 信號傳遞
根據機器人與數控車床的工作流程規劃,機器人將輸入 3個信號、輸出 4個信號,達到與 CNC協調運行的目的。機器人輸入輸出信號地址分配如表 2所示。
表2 機器人輸入/輸出信號

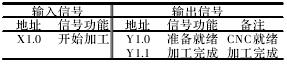
CNC將通過PMC輸入1個信號、輸出2個信號,PMC入輸出信號地址分配如表3所示。
表3 PMC輸入/輸出信號
3.3 系統聯接
機器人和PMC的輸入輸出信號均通過PLC進行邏輯處理和傳遞。三者之間的信號連接關系見圖5。
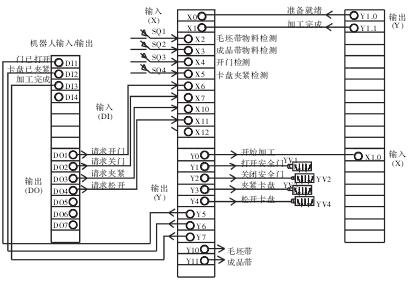
圖5 系統連接圖
4、 系統程序設計
機器人和數控機床均按照各自的程序運行,由機器人完成裝卸料,數控機床完成工件加工。機器人和數控機床之間通過PLC進行信號傳遞,協調運行。為此,需要編制機器人程序、PLC程序,修改數控機床PMC程序。
4.1 機器人程序設計
機器人程序包括主程序和例行程序。機器人運行時執行主程序[4]。在主程序中,根據流程規劃調用表1中的例行程序,進行機器人上下料。
1) 主程序設計。根據系統運行規劃,機器人主程序如下:
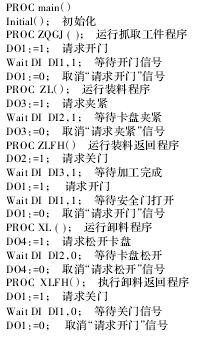
2) 例行程序設計。在設計例行程序時,首先通過示教確定機器人運行的關鍵點,包括取料點、放料點、中間點、安全點等,然后按照運行軌跡調用機器人運動指令,并在需要時夾緊和松開手爪。由于篇幅有限,此處略去具體的程序。
4.2 PLC程序設計
PLC協調機器人和數控機床間的運行,并控制數控車床安全門的打開與關閉、卡盤的夾緊與松開、外部毛坯帶和產品帶的運行。圖 6 所示為根據流程規劃設計的PLC程序。
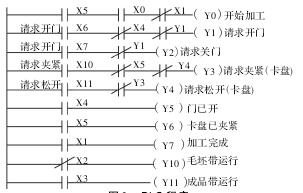
圖6 PLC程序
4.3 PMC程序修改
系統集成時,數控車床內置 PLC(即 PMC)原有程序需要進行修改,以協調數控車床與機器人的運行,使車床在接收到“開始加工”信號時執行加工程序,并在加工程序運行結束后輸出“加工完成”信號等。如圖 7所示,修改 PMC 程序時,在原有程序的最后增加一段程序,F1.4 和 F9.4 為數控系統內部信號,當數控系統準備就緒時,F1.4 值為 1,當加工程序執行后,F9.4 值為 1。G7.2 為數控系統內部的功能激活碼,當 G7.2 值為1時,數控系統激活加工程序,開始加工[5]。
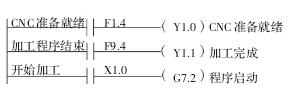
圖7 PMC程序修改
5、 結語
通過將數控車床與工業機器人進行系統集成改造,設計了機器人程序、PLC 程序,修改了數控車床PMC 程序,使數控車床與工業機器人相互協調,在工作流程上有機銜接,實現機械零件自動加工、自動裝卸料。該集成方法實際應用效果好,系統可維護性佳。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

