五軸加工的干涉是五軸數(shù)控加工中有待解決的技術(shù)難題之一。目前已有了一些有效的解決方法。例如, Y. Takeuchi[ 1~4] 等研制了基于實(shí)體模型的五軸免干涉控制軟件。它們是在刀具的徑向和軸向設(shè)置許多檢查點(diǎn), 根據(jù)曲面與檢查點(diǎn)的干涉程度來(lái)調(diào)整刀軸矢量。這種方法雖精度高, 但由于不斷迭代計(jì)算時(shí)間特別長(zhǎng), 且只能在工作站上運(yùn)行, 這樣就限制了軟件的適用性。張定華等[ 5] 對(duì)多軸端銑、側(cè)銑加工中的干涉現(xiàn)象進(jìn)行分析, 提出了一種以臨界約束和刀具與曲面最近距離監(jiān)視為基礎(chǔ)的防干涉方法。這種方法由于沒(méi)將曲面三角化, 誤差較小, 但在計(jì)算點(diǎn)到曲面的最近距離時(shí), 對(duì)算法的可靠性要求較高, 且“傾角H”的精確調(diào)整也很難。
本文提出一種基于曲面模型的免干涉算法, 該算法可對(duì)五軸加工進(jìn)行干涉檢查及修正,在微機(jī)上運(yùn)行, 十分有效。
1 刀具尺寸與干涉的關(guān)系
分析干涉的原因可從刀具尺寸和曲面形態(tài)的關(guān)系來(lái)考慮。刀具尺寸的選擇取決于被加工表面, 一般情況下, 刀具半徑不應(yīng)該大于被加工曲面的最小曲率半徑, 這樣就可以避免干涉。由于刀具半徑變小, 對(duì)材料的去除率相應(yīng)降低, 增加了加工時(shí)間; 此外, 刀具越小, 折斷的可能性越大。因此, 曲面對(duì)刀具半徑的限制對(duì)加工極為不利。刀具尺寸的選取既不能太大,也不能太小。通常的做法是粗加工時(shí)選取直徑較大的圓盤銑刀, 留有一定的加工余量; 精加工時(shí)選取小尺寸的球頭刀加工到曲面的精確尺寸。
2 算法的基本思想
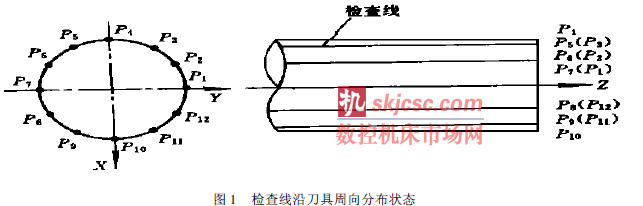
首先將曲面按等參數(shù)三角化, 形成平面三角網(wǎng)格, 以此代替被加工曲面; 然后, 以不考慮干涉所產(chǎn)生的刀位文件作為輸入數(shù)據(jù)進(jìn)行處理, 最后生成針對(duì)被加工曲面的免干涉刀位文件。本算法是基于曲面模型, 為了使刀具具有實(shí)體特性, 特引入檢查線概念。即在刀具周向均勻分布12 條直線段, 直線段的起點(diǎn)位于刀具的頂端( 以圓柱平底銑刀為例) , 方向與刀軸矢量方向相同, 直線段長(zhǎng)度等于刀桿長(zhǎng)度, 如圖1 所示。
3 算法步驟
3. 1 基本思路
首先從輸入數(shù)據(jù)讀取一個(gè)刀位數(shù)據(jù), 得到一個(gè)刀位點(diǎn)和刀軸矢量, 對(duì)于給定的刀具半徑、刀具類型和刀桿長(zhǎng)度, 檢查線自動(dòng)產(chǎn)生, 并存貯到數(shù)組中; 然后就檢查每條直線段是否與三角平面片相交, 如果相交, 經(jīng)過(guò)相應(yīng)處理, 刀軸矢量就發(fā)生改變, 產(chǎn)生免干涉的新刀位數(shù)據(jù)。
3. 2 具體步驟
( 1) 將加工曲面按等參數(shù)三角化, 并將三角形數(shù)據(jù)存入一個(gè)較大的數(shù)組T riang le 1。
( 2) 從輸入數(shù)據(jù)讀取刀位點(diǎn)和刀軸矢量, 根據(jù)刀桿長(zhǎng)度在XOY 平面內(nèi)投影形成一個(gè)圓, 這個(gè)圓就是可能的干涉區(qū)域。在數(shù)組Tr iangle 1 中進(jìn)行搜索, 只要三角形中有一個(gè)頂點(diǎn)在XOY 平面內(nèi)的投影在圓內(nèi), 就記錄這個(gè)三角形, 形成一個(gè)針對(duì)刀位點(diǎn)和刀軸矢量的新的三角形數(shù)組Tr iangle 2。這樣就很快地排除了根本不可能產(chǎn)生干涉的三角形。
( 3) 以刀位點(diǎn)為原點(diǎn), 以刀軸矢量為Zø軸, 建立局部坐標(biāo)系OøX øYøZø。
( 4) 計(jì)算12 個(gè)檢查線起點(diǎn)在局部坐標(biāo)系中的坐標(biāo)值。
(5) 計(jì)算局部坐標(biāo)系到世界坐標(biāo)系的平移變換矩陣M1。
( 6) 計(jì)算局部坐標(biāo)系向世界坐標(biāo)系轉(zhuǎn)換的變換矩陣M2。
( 7) 通過(guò)變換矩陣M1 , M2 , 計(jì)算檢查線起點(diǎn)在世界坐標(biāo)系中的坐標(biāo)值。
( 8) 根據(jù)設(shè)定的刀桿長(zhǎng)度以及刀軸矢量, 可生成12 條世界坐標(biāo)系下的檢查直線段。
( 9) 每條檢查直線段與三角形數(shù)組T riang le 2 中每個(gè)三角平面片求交, 如果有交點(diǎn), 則要記錄直線段被截長(zhǎng)度( 從起點(diǎn)算起) , 存入一個(gè)數(shù)組D 1, 此外還要計(jì)算相交的三角平面片法矢( 指向刀具一側(cè)) , 存入一個(gè)數(shù)組N 1。
( 10) 求出被截長(zhǎng)度數(shù)組D1 中最大值dmax , 若ûdmax û< E, 則此時(shí)的刀位點(diǎn)和刀軸矢量是可接受的, 不需要改變; 否則轉(zhuǎn)步驟( 11) 。E為干涉檢查精度。
( 11) 計(jì)算新的刀軸矢量, 方法是將相交的三角平面片法矢加權(quán)平均, 其中權(quán)重是相應(yīng)的直線段被截長(zhǎng)度, 公式表示為

( 12) 根據(jù)刀位點(diǎn)和上式所求得的新刀軸矢量, 重做步驟( 2) , ( 3) , ( 4) , ( 5) , ( 6) , ( 7) , ( 8) , ( 9) , ( 10) 。若ûdmax û> E, 此時(shí)不重新計(jì)算刀軸矢量, 而是沿著最新的刀軸矢量方向抬刀,其抬刀高度為d max, 由此可得到新的刀位點(diǎn)。
3. 3 算法說(shuō)明
上述算法中對(duì)刀軸矢量只進(jìn)行了一次計(jì)算, 當(dāng)然為了提高準(zhǔn)確性可以進(jìn)行兩次、三次等多次計(jì)算, 但事實(shí)上, 從上機(jī)實(shí)踐可以看出, 只要計(jì)算一次刀軸矢量, 絕大部分干涉即可排除, 較少量的干涉可通過(guò)抬刀消除, 這樣就大大地節(jié)省運(yùn)行時(shí)間。由于刀具類型較多, 刀心位置也不同, 如圖2 所示。
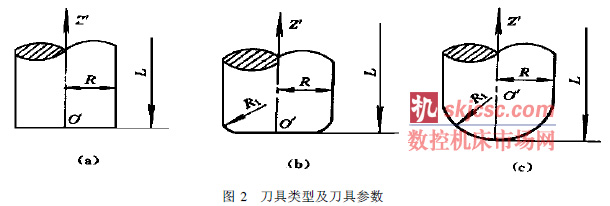
在算法中, 檢查線段起始位置設(shè)定也有所不同。假設(shè)局部坐標(biāo)系OøX øYøZø的原點(diǎn)在刀心, Zø軸與刀軸矢量相同, 則對(duì)于端銑刀( R1= 0) , 檢查線段起始位置為Zø= 0, 即與刀心處在同一高度。對(duì)于環(huán)銑刀( R> R1 ) 和球頭刀( R= R1 ) , 檢查線段起始位置為Zø = - 0. 5R 1, 即從刀心Oø向下0. 5 倍圓角半徑處。由上可以看出, 檢查線段起始位置的設(shè)定, 對(duì)端銑刀是準(zhǔn)確值, 而對(duì)環(huán)銑刀和球頭刀則是近似值。
4 干涉處理實(shí)例
本文用上述算法對(duì)如圖3 所示曲面進(jìn)行干涉處理。
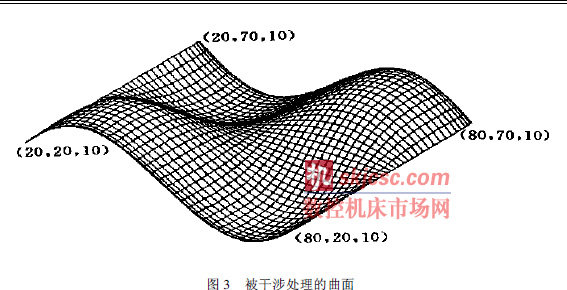
原始數(shù)據(jù): 平底端銑刀, 刀具半徑R = 2. 5mm, 圓角半徑R 1= 0, 刀桿長(zhǎng)度L = 50mm;干涉檢查精度E= 0. 01; 曲面三角化, U 向分為100 個(gè)點(diǎn), nU= 100, V 向分為100 個(gè)點(diǎn), nV=100; 曲面被( nU- 1) ( nV- 1) ×2= 18062 個(gè)平面三角片所逼近。在486 微機(jī)上運(yùn)行, 運(yùn)行時(shí)間為30min。
部分刀位點(diǎn)處的干涉處理情況如表1 所示。可見(jiàn)刀軸矢量經(jīng)過(guò)一次調(diào)整即達(dá)到精度要求。

如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com








